Walking Robot with decoupled motion. Optimal design and synthesis
Abstract
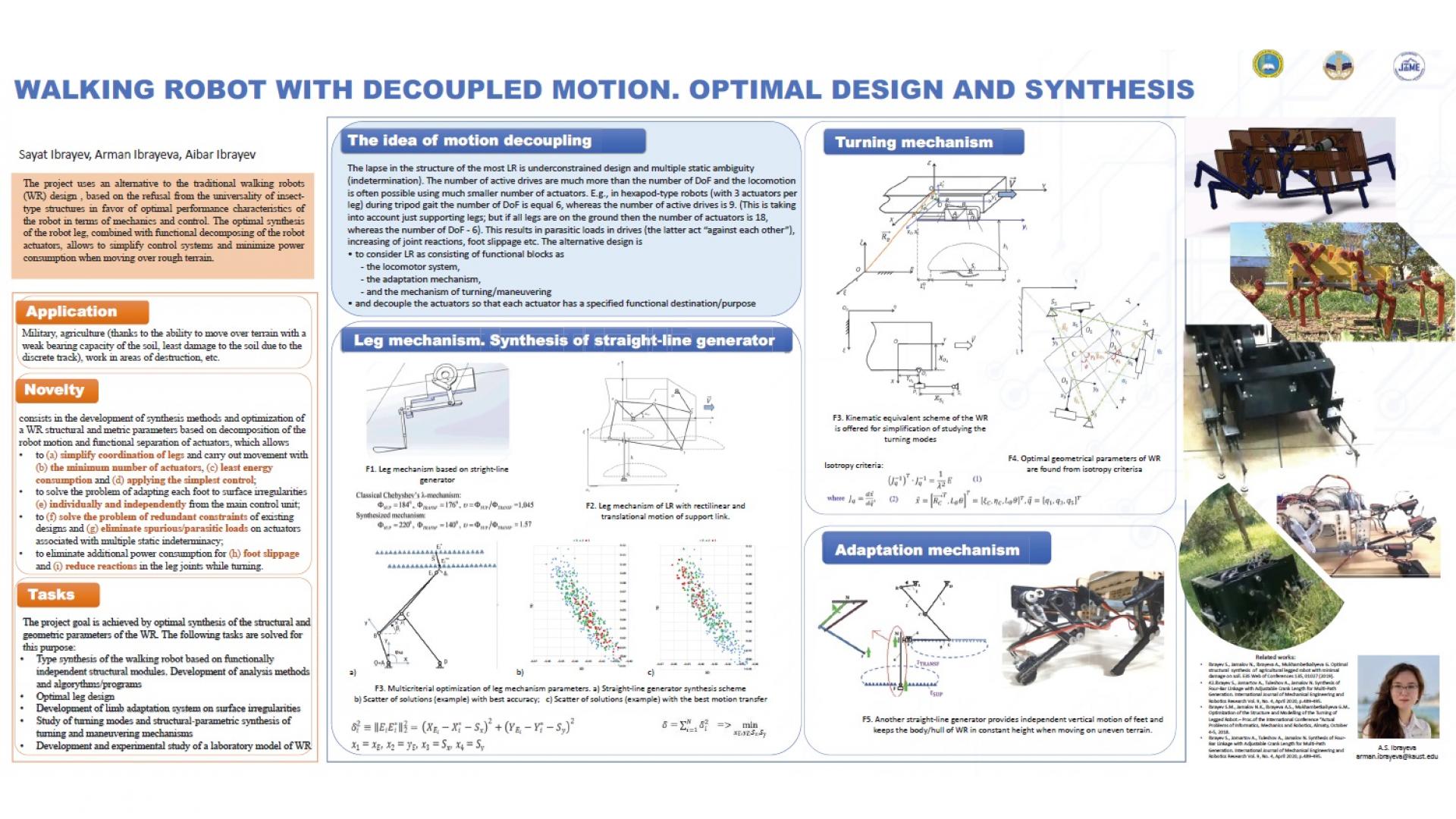
Legged machines that can adapt to off-road conditions have a number of advantages over traditional wheeled and tracked vehicles. In particular, they cause the least damage to the soil, in comparison with other vehicles, due to the discrete track on the ground, what make them beneficial in agricultural application. Meanwhile, attaining to increase productivity of agricultural machines leads to increase of machine weight that cause increased soil pressure and unfavorable conditions for plant growth. However, many of traditional (existing) designs of walking robots (WR) are extremely ineffective in terms of power consumption and complexity of control system. In particular, more than ten actuators and multi-level control are used for turning such systems. The alternative design is
- to consider WR as consisting of functional blocks as
a) the locomotor system;
b) the adaptation mechanism;
c) and the mechanism of turning/maneuring
- and decouple the actuators so that each actuator has a specified functional destination/purpose
In this work, a rational structure of WR is proposed that allows to carry out the robot hull shifting and rotation with a minimum number of actuators. At the same time adjusting the chassis height and the foot adaptation on the rough terrain is carried out by another group of actuators. A kinematically equivalent scheme of the robot is proposed in order to simplify the study of the turning modes that allowed to determine the optimal geometrical parameters of the robot. Multicriteria synthesis methods of closed-loop robot manipulators based on isotropy, maneurability and other criteria were developed for structural-parametric synthesis of turning and develop an optimal leg mechanism, limb adaptation system on surface irregularities. The design proposed allowed to solve the problem of redundant constraints of existing designs and eliminate spurious/parasitic loads on actuators associated with multiple static indeterminacy; to eliminate additional power consumption for foot slippage; and reduce reactions in the leg joints while turning. A layout of LR was developed for experimental studies.
Brief Biography
2021 KAUST, PhD student, Mechanical Engineering
2020 Kazakh National University, Kazakhstan, Master of Science, Mechanical Engineering (concentration in Robotic Systems)
2018 Kazakh National University, Kazakhstan, Bachelor of Science, Mechanical Engineering