The semantic PHD filter for multi-class target tracking
Abstract
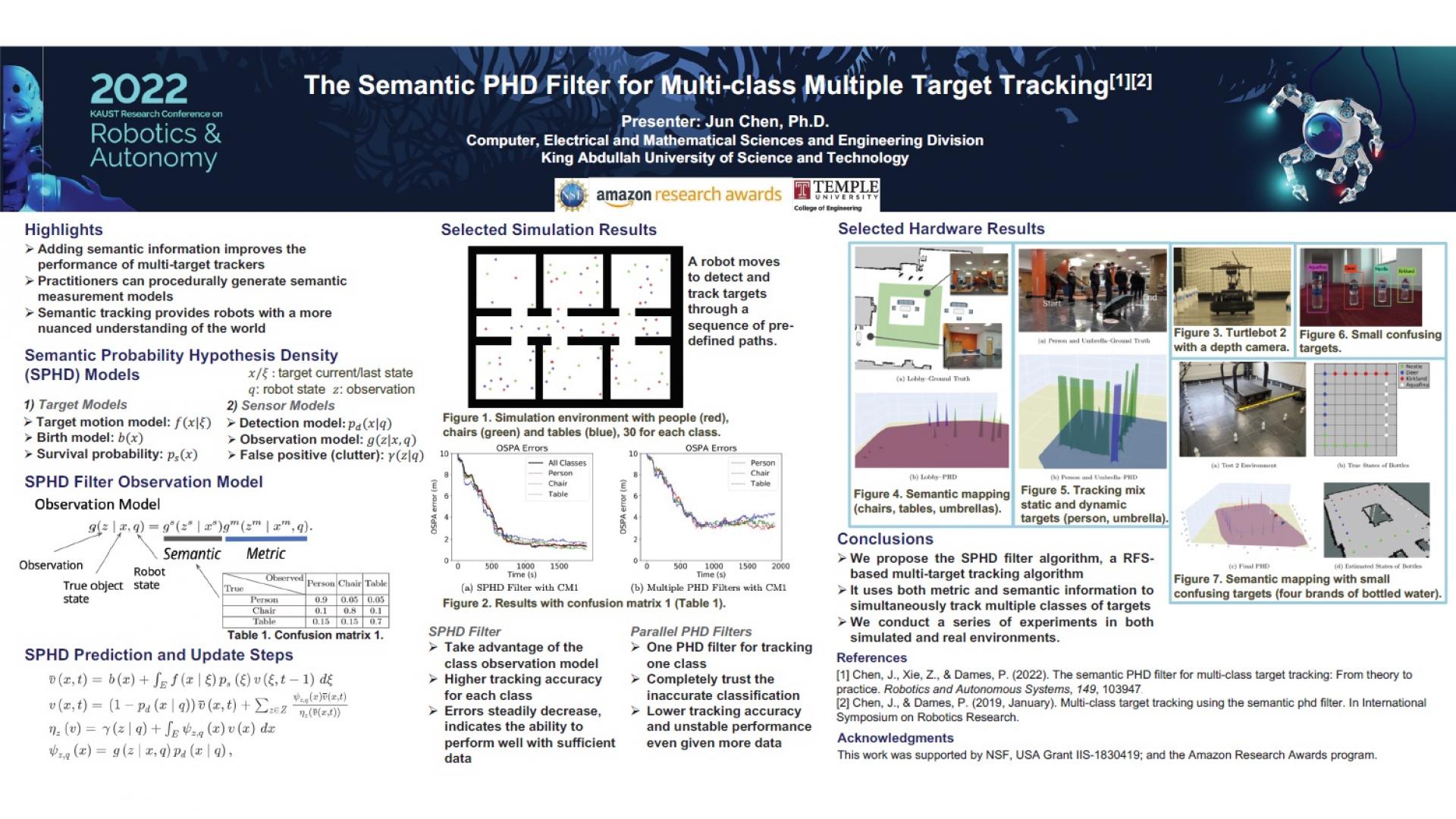
In order for a mobile robot to be able to effectively operate in complex, dynamic environments it must be capable of understanding both where and what the objects around them are. In this paper we introduce the semantic probability hypothesis density (SPHD) filter, which allows robots to simultaneously track multiple classes of targets despite measurement uncertainty, including false positive detections, false negative detections, measurement noise, and target misclassification. The SPHD filter is capable of incorporating a different motion model for each type of target and of functioning in situations where the number of targets is unknown and time-varying. To demonstrate the efficacy of the SPHD filter, we conduct both simulated and hardware tests with multiple target types containing both static and dynamic targets. We show that the SPHD filter allows effective tracking of multiple classes of targets even with detection error to some level, and performs better than a collection of PHD filters running in parallel, one for each target class. We also provide a detailed methodology that practitioners can use to fit the probabilistic sensor models necessary to run the SPHD filter.
Brief Biography
Jun Chen received his M.S. degree in Electrical and Computer Engineering from Stevens Institute of Technology, the USA in 2017 and his Ph.D. degree in Mechanical Engineering from Temple University, the USA in 2021. Before that, he received his B.S. degree from Hefei University of Technology, China in 2015. He is currently a postdoctoral research fellow in the KAUST Robotics, Intelligent Systems, and Control (RISC) Laboratory. His research interests include multi-robot system, information-based control, and robot learning.