Control Design for Reduced-G Atmospheric Flights
Abstract
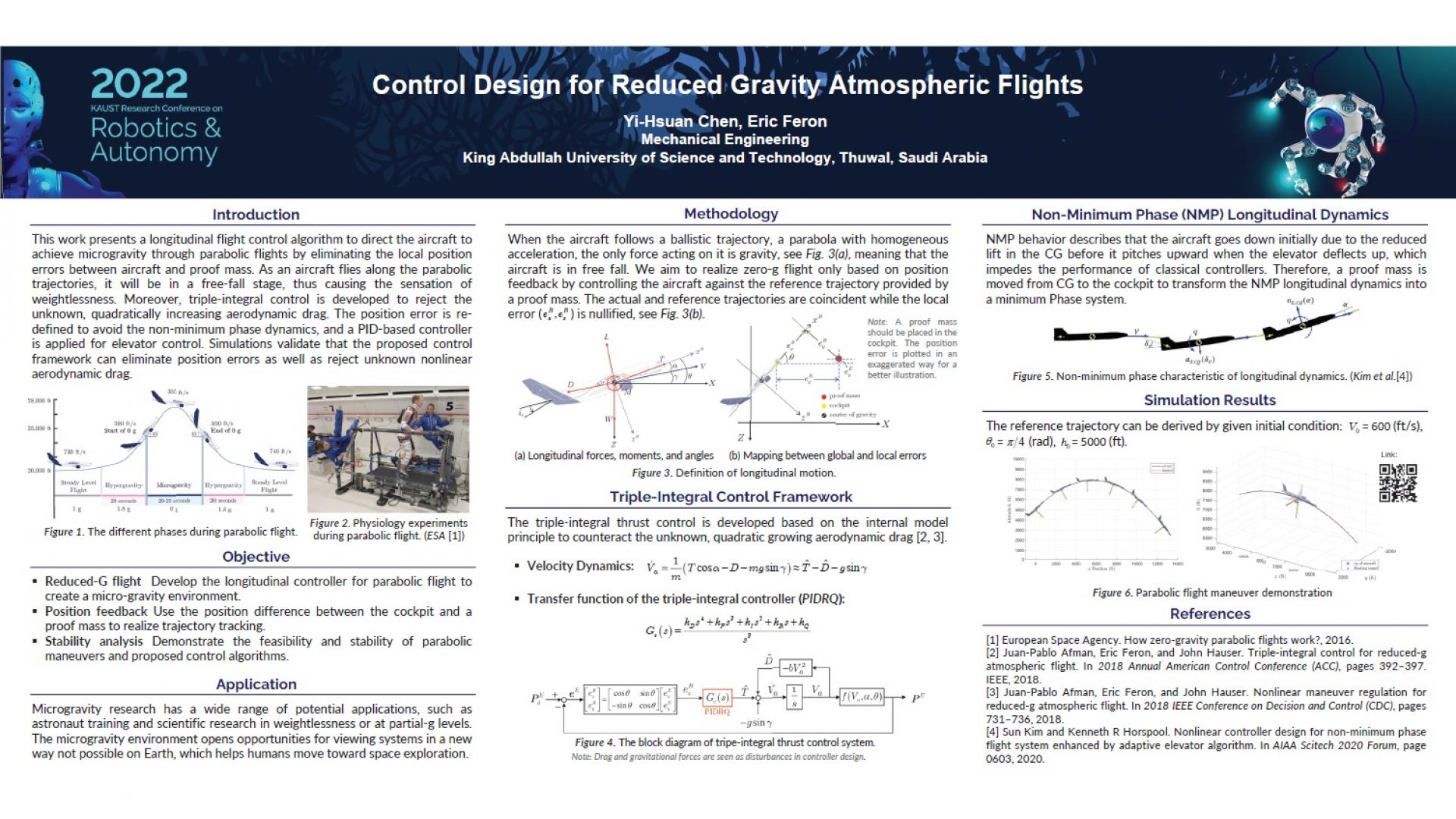
This work presents a longitudinal flight control algorithm to direct the aircraft to achieve microgravity through parabolic flight. The proposed control strategy makes an aircraft follow the desired trajectory by eliminating the local position errors between aircraft and proof mass. As an aircraft flies along the parabolic trajectories, it will be in a free-fall stage, thus causing the sensation of weightlessness. Moreover, triple-integral control is developed to reject the unknown, quadratically increasing aerodynamic drag. The position error is re-defined to avoid the non-minimum phase dynamics, and a PID-based controller is applied to reduce the normal position error. Simulations validate that the proposed control framework can eliminate position errors as well as reject unknown nonlinear aerodynamic drag.
Brief Biography
Yi-Hsuan Chen is a Master's student in Robotics, Intelligent Systems, and Control (RISC) Lab led by Prof. Eric Feron. She joined the mechanical engineering program at KAUST in August 2020. She received her bachelor's degree in Aeronautics and Astronautics from National Cheng Kung University (NCKU), Taiwan. Her research has been focused on unmanned aerial vehicles and flight control systems. She is currently working on developing a longitudinal controller for parabolic maneuvers to simulate the microgravity environments on Earth.