Working under the ocean is very difficult, even for automated machines, but a KAUST team is making great strides with an optical system for monitoring sensor locations.
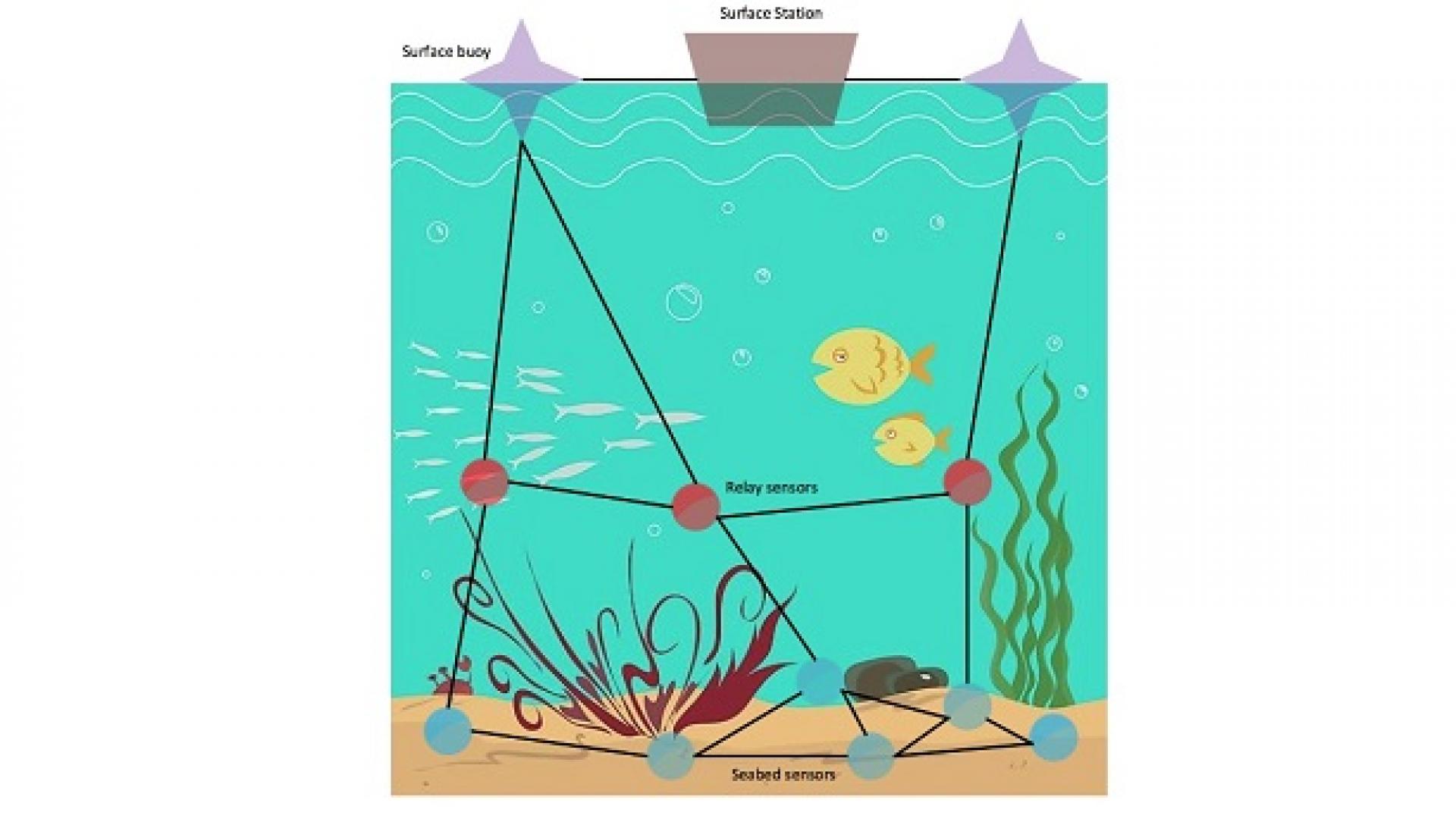
Extensive networks of underwater sensors—some attached to the seabed, some suspended in the water and some on floating surface buoys — are proposed by Nasir Saeed, working with Professors Tareq Al-Naffouri and Mohamed-Slim Alouini from the Department of Electrical Engineering.
In their latest work, the team tackles the sensor localization problem—monitoring the positions of sensors in an ever-changing 3D ocean environment, where surface tools, such as a global positioning system (GPS), do not work.
The team has ambitious plans to develop underwater wireless sensor networks to assist with biological sampling, offshore exploration, and disaster management. But building such systems is tricky, with one of the biggest challenges being to keep track of where the sensors are.
The team investigated how sensors could measure their relative positions by sending optical light signals to one another. Optical signals can provide accurate distance measurements but have limited transmission ranges due to effects of the water.
“Underwater optical channel impairments, such as absorption, scattering, turbulence and air bubbles, can cause large-range measurement errors, known as outliers,” Saeed explains. “For example, we know that the range of optical waves is tens of meters, but if the received power is very low due to signal impairments, then the sensor may estimate an unrealistic distance of hundreds of meters.”
In their previous work, published by KAUST Discovery in March 2018, the researchers did not address outliers and restricted their network to a simplified 2D situation. Their latest paper tackles the more realistic 3D water environment and describes methods of quickly identifying and fixing outliers, improving the overall accuracy of sensor localization.
“The second part of our work considers the optimization of anchor positions to improve the localization accuracy,” says Saeed. “For 3D localization, the anchors should not be in the same plane, and their heights (depths) need to be adjusted to get better estimates of their positions.”
Read the full article
Related Persons


