TwinPrint: A Dual-Arm Robotic System for 3D Biofabrication
Abstract
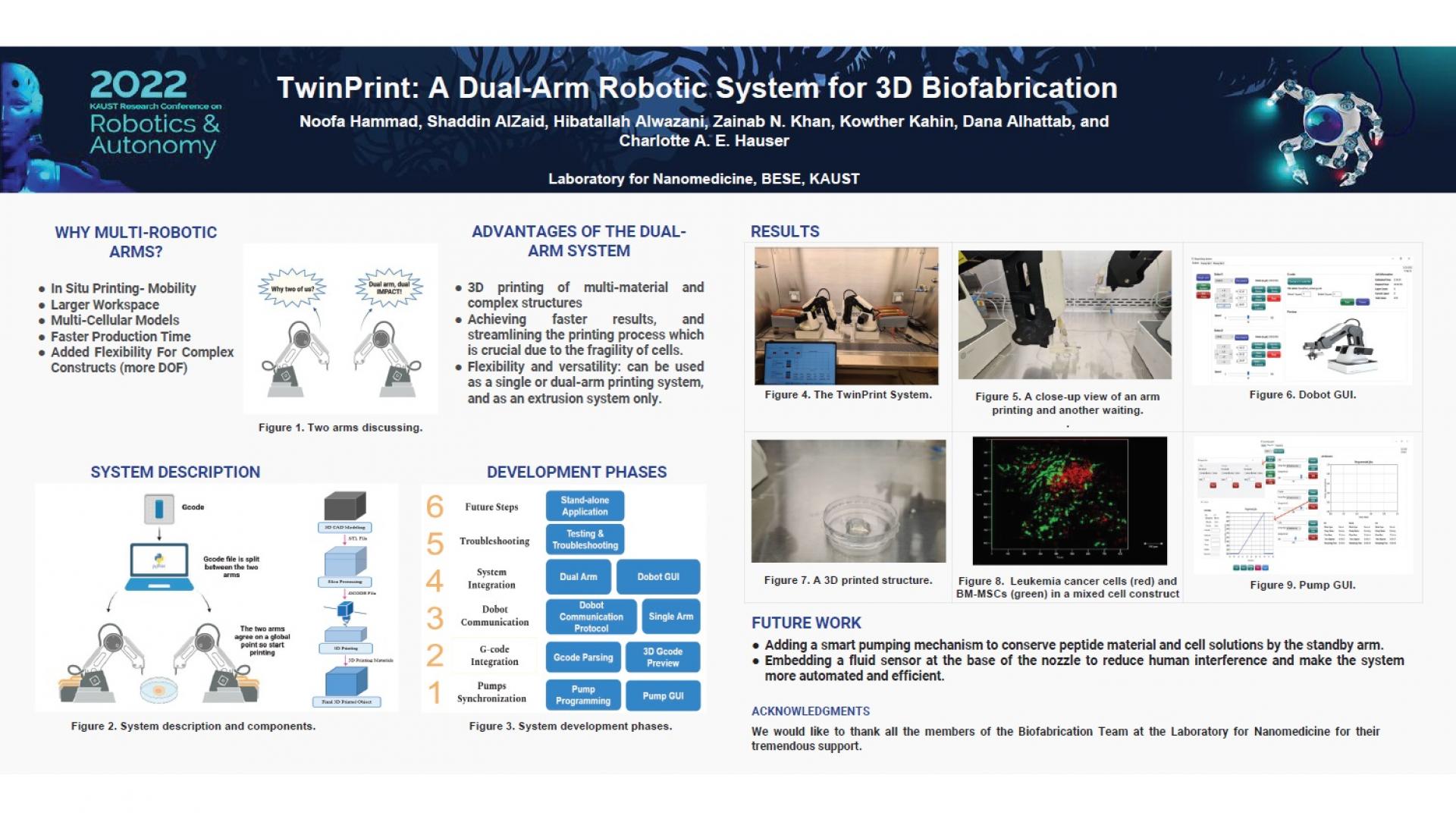
The process of three-dimensional (3D) bioprinting of cell-laden biomaterials receives a great deal of interest in the field of Personalized Medicine for tissue and organ fabrication solutions. As compared to conventional 3D printing, the process of 3D bioprinting entails additional complexities, making it a challenge to achieve high print resolution with bioinks of low viscosities while producing strong shape fidelity and maintaining cell viability. Addressing these complexities requires highly specialized software and well-designed hardware to allow the construction of biological constructs with three-dimensional architectures in terms of efficient motion, accuracy, and resolution. Multi-material printing is an added complication that is required for structures of more complex geometry and biological formation. As such, this research highlights the development of a twin-arm robotic system, “TwinPrint”, for 3D biofabrication. The system integrates the hardware of two 4-axis robots and two sets of microfluidic screw-driven pumps to allow for multi-material deposition with independent motion paths, a synchronized printing and extrusion process, and an easy-to-use graphical user interface. The integrated software package, developed in Python, provides all required printing and extrusion parameters in the GUI, including pump status, flow rate, printing time, home position, axes positioning, z-axis leveling and a preview of the desired g-code file. The advantages of the system are entailed in the combination of printing low-viscosity bioinks with the precision of screw-driven extrusion and added flexibility from the robots. This achieves faster results, reduces printing time, and streamlines the printing process which is crucial due to the fragility of cells. An in-house developed coaxial nozzle is seamlessly incorporated in the system to allow instantaneous gelation of peptide bioinks, which are highly dependent on the technology of such a system to achieve high resolution printing capabilities. The system was used to 3D bioprint an acute myeloid leukemia disease model to assess functionality. The different cell types maintained their morphology post-printing which yields promising results for further studies. The advantage of printing with multiple peptide concentrations also suggested an improvement in mechanical fidelity, which will be further evaluated and verified in future studies.
Brief Biography
Noofa Hammad is an Electrical and Robotics Engineer at the Laboratory for Nanomedicine, KAUST. She received her B.Sc in Electrical and Computer Engineering from Effat University, KSA with the first distinction. Currently, she is doing her Master's studies in Electrical and Computer Engineering at the University of Victoria, Canada. Her research interest is mainly applying AI to robots and control systems.