
ISL Students place 4th at Microsoft Indoor Localization Competition 2017
About
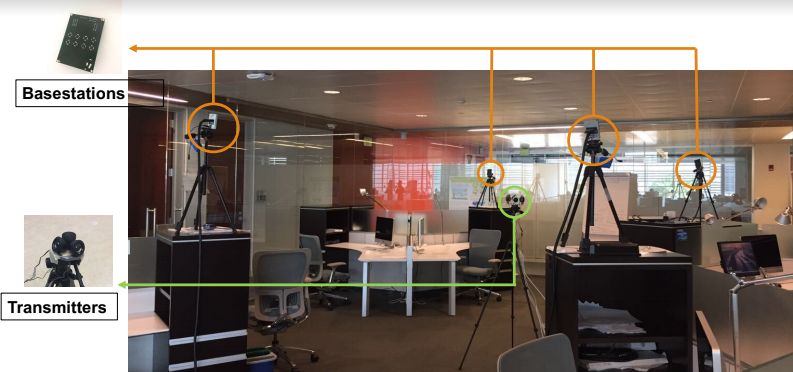
Accurate indoor positioning has the potential to transform the way people navigate indoors similar to the way the GPS transformed outdoor navigation. Over the last 20 years, many indoor positioning technologies have been proposed and experimented by both academia and industry. We developed an accurate acoustic 3D positioning system, which consists of one mobile device (MD) and four base stations (BSs) with known locations. The MD transmits a series of ultrasound and RF sequences, named Zadoff-Chu (ZC) sequences, at the same time. The propagation time of the RF signal is negligible compared to the ultrasound signal, due to the large speed of light compared to sound. Therefore, the RF ZC sequences are utilized to synchronize the MD with the BSs. The distance from the MD to each of the four BSs is estimated by estimating the time of flight (ToF) of the transmitted sequence. Finally, these distances are converted to a 3D position using a trilateration algorithm. Our positioning system won the fourth place in Microsoft Indoor Localization competition 2017, in a two-floor area where each floor is 18m x 20m x 4m.
Link to Indoor Localization System Overview Document
Related People
Related Researchers



Hui Chen
- Ph.D. Student (former), Electrical and Computer Engineering

Tarig Ballal Khidir Ahmed
- Research Scientist, Electrical and Computer Engineering
image processing acoustic signal detection Digital signal processing low complexity systems Low sampling Ultra-wideband communication UWB channel impulse response estimation. Acoustic sensing and communications Sonars and radars. Movement detection and tracking using RF and acoustic waves. Respiration detection and tracking. Robust estimation and regularization Experimentation and testing.
