
Yveline Pailles
Postdoctoral Research Fellow, Photonics Laboratory
Andrea Bianco, Full Professor, Electronics and Telecommunications Department at Politecnico di Torino
B9 L4 R4125
Marwa Eldiwiny, PhD Student, IEEE RAS Org
KAUST
Prof. Francesca Gardini, Università di Pavia
B1 L3 R3119
Prof. Amitava Bhattacharjee, Astrophysical Sciences, Princeton University
B20 Auditorium
Prof. Emil Björnson, KTH Royal Institute of Technology, Stockholm, Sweden
KAUST
Emilio Frazzoli, Professor, Dynamic Systems and Control, ETH Zürich
KAUST
applied mathematics Numerical Solution of Partial Differential Equations Finite elements machine learning Numerical Optimization medicine computational mechanics contact problems fluid-structure interactions cardiac simulation biomechanics geology Multiphysics Simulation HPC optimization Multigrid Domain Decomposition software development
The 2nd SAAI Factory Hackathon Kickoff Symposium 2023
B20 Auditorium
Jean Oh, Senior Systems Scientist, Robotics Institute, Carnegie Mellon University
KAUST
Marco Pavone, Associate Professor, Aeronautics and Astronautics, Stanford University
KAUST
Otavio Dezem Bertozzi Junior, MS Student, Physical Science and Engineering
KAUST
Necmiye Ozay, Associate Professor, University of Michigan
KAUST
Sam Coogan, Assistant Professor, Georgia Institute of Technology
KAUST
Prof. Jean-Paul Linnartz, Electrical Engineering, Eindhoven University of Technology
KAUST
Prof. Moncef Gabbouj, Department of Computing Sciences, Tampere University
B1 L3 R3119
Prof. Johann Reger, Computer Science and Automation Faculty, TU Ilmenau, Germany
KAUST
Prof. Johann Reger, Computer Science and Automation Faculty, TU Ilmenau, Germany.
KAUST
Prof. Alexandros Beskos, the Dept of Statistical Science, University College London (UCL)
KAUST
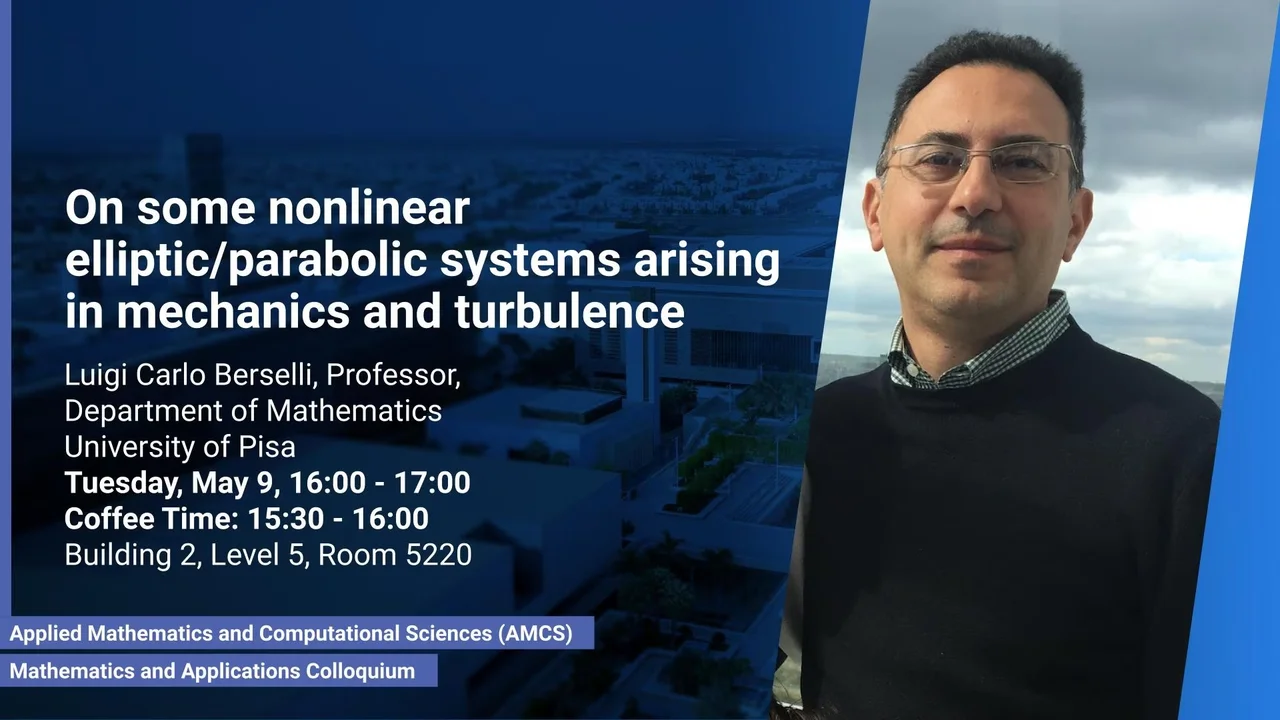
Prof. Luigi Carlo Berselli
B2 L5 R5220
applied mathematics Numerical Solution of Partial Differential Equations Finite elements machine learning Numerical Optimization medicine computational mechanics contact problems fluid-structure interactions cardiac simulation biomechanics geology Multiphysics Simulation HPC optimization Multigrid Domain Decomposition software development
Dr. Danesh Moradigaravand, Infectious Disease Epidemiology lab, BESE, KAUST
B3 L5 R5209